In het kort:
Afregelen van de Hall sensors en de bijbehorende elektronica.
Het meten van de nauwkeurigheid van dit systeem
Deze procedure kan uitgevoerd worden in het Labo of als de Top unit op de definitieve plaats gemonteerd is.
Aangenomen is hier dat als de magneet geplaatst wordt, de spanning op de Hall sensor lager is dan halfweg de voedingsspanning.
Aangezien de versterkertrappen inverterend zijn zal de uitlezing via de Arduino en de GUI toenemen als de magneet de betreffende sensor nadert.
1/ Vergrendel de magneet in het midden met de vergendelklos.
2/ Controleer met een niet magnetisch meetinstrument dat de afstanden tussen de magneet en de Hall sensors zo goed mogelijk gelijk zijn, binnen ca 1 mm. Zo niet moet de print met de sensors versteld worden.
3/ Zet de gain van de versterkers op maximum met de gain potmeters.
4/ Regel de offset potmeters af voor een uitlezing van 128 eenheden.
5/ Zet de vergrendelklos op de laagste positie.
6/ Verplaats de kabel naar de Noord positie zodat het 6 mm buisje tegen de rand van het gat in de onderste plaat komt en regel de gainpotmeter af voor een uitlezing van 250. Herhaal dit voor Zuid, Oost en West.
Met behulp van een oude A3 plotter was ik in staat de nauwkeurigheid van het Hall sensor systeem te bepalen.
De plotter beschikte alleen nog maar over het bewegingsmechanisme en de stappenmotoren. Er was al wel een nieuwe stepper drive voor gemaakt.
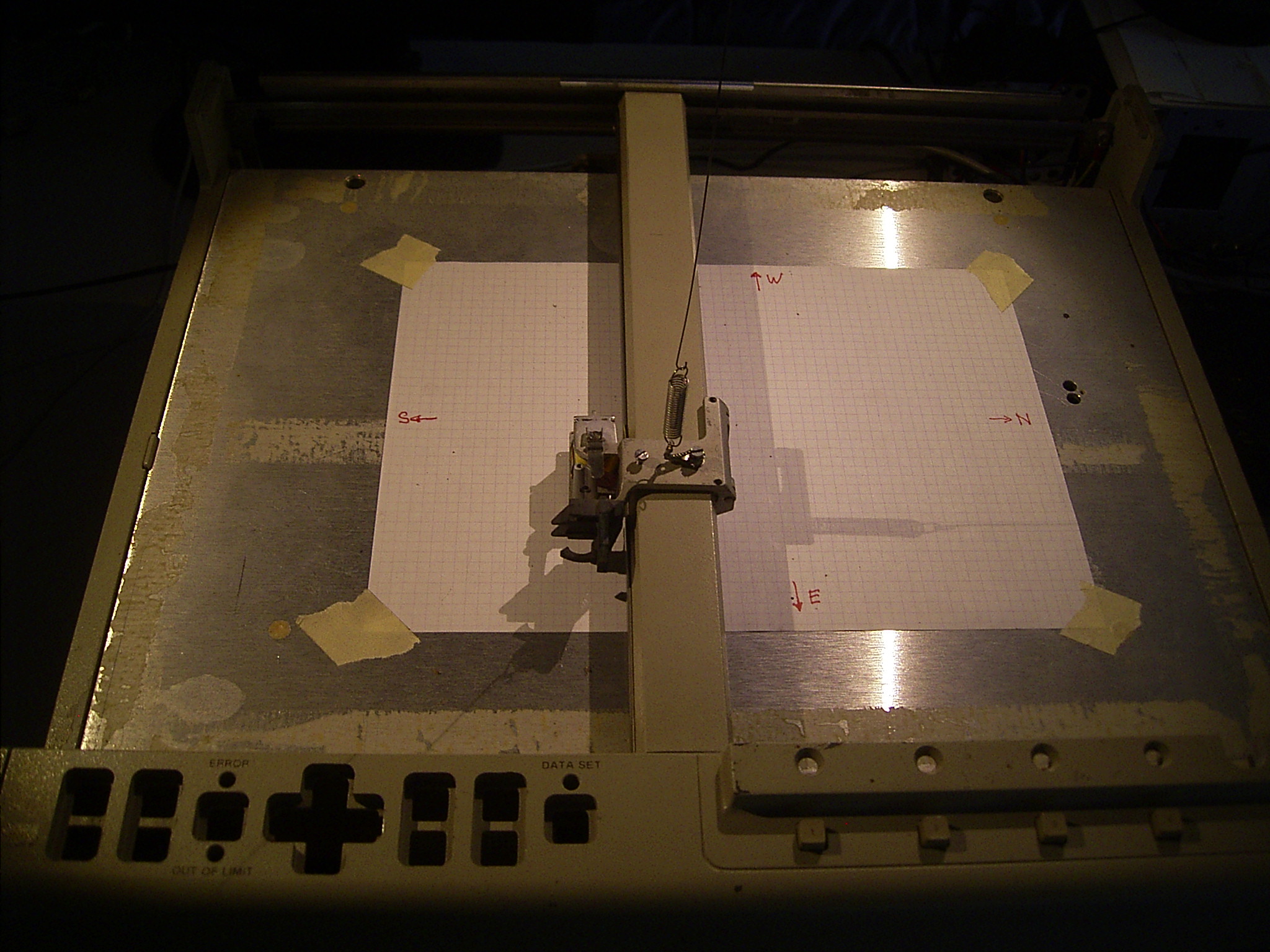
Fig 1. De A3 plotter.
De plotter werd gecentreerd onder de top unit geplaatst die 134 cm daarboven aan het plafond bevestigd was. De kabel werd met een veertje aan de plotterkop bevestigd.
Met voor deze gelegenheid gemaakte software kon ik de kabel naar een aantal gedefiniëerde posities brengen en dan het resultaat vastleggen en grafisch weergeven.
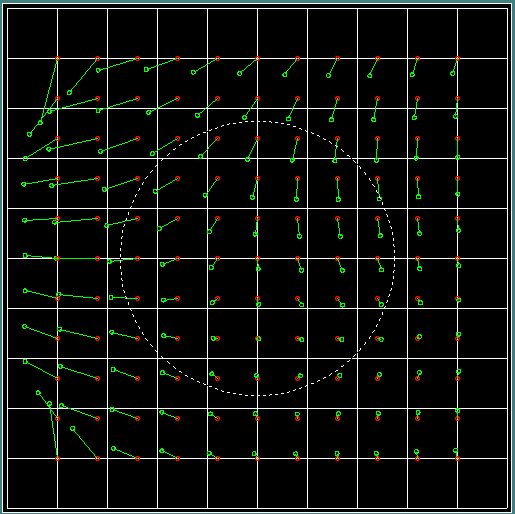
Fig 2. Meting zonder voorafgaande afregeling.
De rode cirkeltjes geven de meet-posities aan, de goene het resultaat uit de Hall sensors.
De groene lijntjes geven aan wie bij wie hoort.
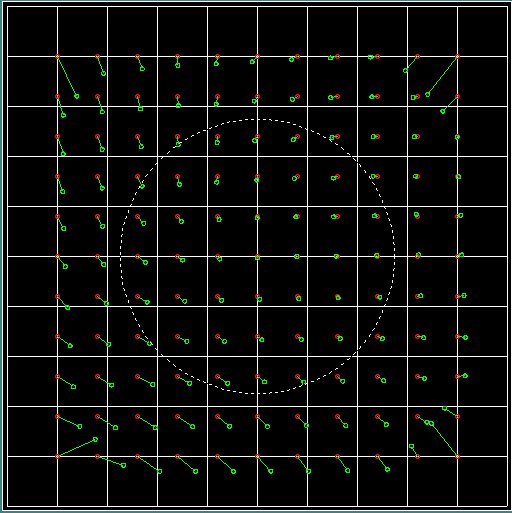
Fig 3. Na de afregel procedure.
De grote fouten in de hoeken werden veroorzaakt doordat de stang van de magneet de onderste plaat raakte.
De gestippelde cirkel geeft aan welk bereik er feitelijk gebruikt wordt door de slinger.
De resterende fouten accepteer ik voorlopig.